FreeRtos中断优先级
- 作者: 五速梦信息网
- 时间: 2026年06月03日 13:45
FreeRtos中断优先级
- 2024-11-03
以下转载自安富莱电子: http://forum.armfly.com/forum.php NVIC 的全称是 Nested vectored interrupt controller,即嵌套向量中断控制器.对于 M3 和 M4 内核的 MCU,每个中断的优先级都是用寄存器中的 8 位来设置的. 8 位的话就可以设置 2^8 = 256 级中断,实际中用不了这么多,所以芯片厂商根据自己生产的芯片做出了调整.比如 ST的 STM32F1xx 和 F4xx 只使用了这个 8 位中的高四位[7:4],
FreeRTOS中断优先级配置(重要) 本章节为大家讲解FreeRTOS中断优先级配置,此章节非常重要,初学者经常在这里犯迷糊.对于初学者来说,本章节务必要整明白.12.1 NVIC基础知识12.2 使用FreeRTOS时如何配置外设NVIC12.3 FreeRTOS配置选项中NVIC相关配置12.4 不受FreeRTOS管理中的的深入讨论12.5总结 12.1 NVIC基础知识 NVIC的全称是Nested vectoredinterrupt controller,即嵌套向量中断控制器
最近在使用FreeRTOS的时候,突然发现程序在运行了几分钟之后所有的任务都不再调用了,只有几个中断能正常使用,看来是系统挂掉了,连续测试了几次想找出问题,可是这个真的有点不知所措. 我先看了下文档里的常见错误,发现和我现在有关系的也就堆栈大小的设置和中断嵌套优先级的设置了,不过我这几个任务都是比较简单的,没有太多的变量,那么现在设置的堆栈大小是够的,不然也不会运行一段时间才奔溃,应该一运行就会奔溃的.那么把问题就集中到了中断嵌套优先级里,我尝试了把 configKERNEL_IN
最近在使用FreeRTOS的时候,突然发现程序在运行了几分钟之后所有的任务都不再调用了,只有几个中断能正常使用,看来是系统挂掉了,连续测试了几次想找出问题,可是这个真的有点不知所措. 我先看了下文档里的常见错误,发现和我现在有关系的也就堆栈大小的设置和中断嵌套优先级的设置了,不过我这几个任务都是比较简单的,没有太多的变量,那么现在设置的堆栈大小是够的,不然也不会运行一段时间才奔溃,应该一运行就会奔溃的.那么把问题就集中到了中断嵌套优先级里,我尝试了把 configKERNE
关于 Arm Cortex M 系列内核的中断优先级 https://community.arm.com/arm-community-blogs/b/embedded-blog/posts/cutting-through-the-confusion-with-arm-cortex-m-interrupt-priorities Cortex M 的中断和优先级 首先要区分开 中断 和 中断优先级 这是两个不同的东西, 不要搞混了 对于 Cortex-M0 和 Cortex-M0+ 内核, 除了系统
以下教程(大部分章节)(尤其理论介绍部分)转载自安富莱电子,官网链接: http://forum.armfly.com/forum.php 然后根据安富莱的教程自己做了分析和测试,希望大家共同进步. 其中也有个别章节是正点原子和野火的教程. 提高篇开始是自己根据使用经验的原创,期间也有参考官方资料的原创.主要先使用安富莱的教程达到入门水平.有需要时还得分析源码. 目录 1.FreeRTOS——1 2.FreeRTOS基础知识 3.FreeRtos——移植 4.FreeRtos——单任务 5.Fr
以下转载自安富莱电子: http://forum.armfly.com/forum.php FreeRTOS 的初始化流程推荐的初始化流程如下,本教程配套的所有例子都是采用的这种形式,当然,不限制必须采用这种初始化方式,适合自己项目的才是最好的: int main(void) { /* 在启动调度前,为了防止初始化 STM32 外设时有中断服务程序执行,这里禁止全局中断(除了 NMI 和 HardFault). 这样做的好处是: 1. 防止执行的中断服务程序中有 FreeRTOS 的 API 函
转自:https://blog.csdn.net/xukai871105/article/details/53516857 前言本文将说明在FreeRTOS嵌入式操作系统中,如何设置STM32 Cortex M3和M4系列MCU的中断优先级.总结 [1]STM32L1系列,STM32F1系列,STM32F4系列,设置NVIC时需要使用NVIC_PriorityGroup_4. [2]抢占优先级的要比“MAX”更大,而比“LOWEST”更小.例如 configLIBRARY_MAX_SYSCALL
下面对 FreeRTOS 优先级相关的几个重要知识点进行下说明,这些知识点在以后的使用中务必要掌握牢固. FreeRTOS 中任务的最高优先级是通过 FreeRTOSConfig.h 文件中的 configMAX_PRIORITIES 进行配置的,用户实际可以使用的优先级范围是 0 到 configMAX_PRIORITIES – 1.比如我们配置此宏定义为 5,那么用户可以使用的优先级号是 0,1,2,3,4,不包含 5,对于这一点,初学者要特别的注意. 用户配置任务的优先级数值越小,那么
郑重声明,版权所有! 转载需说明. FREERTOS堆栈大小的单位是word,不是byte. 根据处理器架构优化系统的任务优先级不能超过32,If the architecture optimized method is used then configMAX_PRIORITIES cannot be greater than 32. vTaskDelay() delay from call the vTaskDelay vTaskDelayUntil delay from last wake
资源:http://blog.csdn.net/zhzht19861011/article/category/6191478 资源:可以下载安富莱的STM32-V5开发版资料中的FreeRTOS教程,里面有详细介绍各个功能,可以在http://wenku.baidu.com/search?word=%B0%B2%B8%BB%C0%B3STM32-V6%BF%AA%B7%A2%B0%E5FreeRTOS%BD%CC%B3%CC&lm=0&od=0&fr=top_home中查找相应的文
而ucos的任务优先级是任务优先级的数组越小,任务优先级越高.和STM32的中断优先级保持一样的分析,和freeRTOS相反.
任务函数原型: void ATaskFunction(void * pvParameters); 任务不允许从实现函数中返回.如果一个任务不再需要,可以用vTaskDelete()删除; 一个任务函数可以用来创建多个任务,各任务均是独立的执行实例,拥有属于自己的栈空间. 典型的任务函数结构: void ATaskFunction( void *pvParameters ) { /* 可以像普通函数一样定义变量.用这个函数创建的每个任务实例都有一个属于自己的iVarialbleExample变 量
源:FreeRTOS初步认识 用了半天时间对FreeRTOS有了一个初步的认识,大概总结一下,其中混杂了系统实现和实际应用方面的问题. 现只是以应用为目的,实现方面待以后进一步研究. 1.FreeRTOS提供的功能包括:任务管理.时间管理.信号量.消息队列.内存管理.与平台有关的文件包含在portable文件夹中,主要是port.c, portmacro.h两个文件.平台无关的文件主要是:list.c(基本链表结构), queue.c(包括消息队列,信号量的实现), croutine.c,tas
1.任务相关的API函数 函数存在于task.c中,主要的函数有: xTaskCreate():使用动态的方法创建一个任务: xTaskCreatStatic():使用静态的方法创建一个任务(用的非常少): xTaskCreateRestricted():创建一个使用MPU进行限制的任务: vTaskDelete():删除一个任务: vTaskSuspend():挂起一个任务: vTaskResume():恢复一个任务的运行: vTaskResumeFromISR():中断服务函数中恢复一个任务
1.FreeRTOS目录结构 FreeRTOS FreeRTOS简略目录如下: ├─FreeRTOS │ ├─Demo // 各种开发工具的完整Demo,开发者可以方便的以此搭建出自己的项目,甚至直接使用 │ │ ├─Common // 所有例程都可以使用的演示例程文件 │ │ └─其他 // 对应平台和开发工具的项目例程(命名:平台_开发工具,例如:CORTEX_M4F_M0_LPC43xx_Keil) │ ├─License // 使用修改过的GPL │ └─Source // FreeRT
FreeRTOS内核是高度可定制的,使用配置文件FreeRTOSConfig.h进行定制.每个FreeRTOS应用都必须包含这个头文件,用户根据实际应用来裁剪定制FreeRTOS内核.这个配置文件是针对用户程序的,而非内核,因此配置文件一般放在应用程序目录下,不要放在RTOS内核源码目录下. 在下载的FreeRTOS文件包中,每个演示例程都有一个FreeRTOSConfig.h文件.有些例程的配置文件是比较旧的版本,可能不会包含所有有效选项.如果没有在配置文件中指定某个选项,那么RTOS内核会使
1.前言 最新的 FreeRTOS 移植中允许中断嵌套.中断嵌套需要在 FreeRTOSConfig.h 中设置configKERNEL_INTERRUPT_PRIORITY 和configMAX_SYSCALL_INTERRUPT_PRIORITY 2.控制中断嵌套的常量 常量 描述 configKERNEL_INTERRUPT_PRIORITY 设置系统心跳时钟的中断优先级.如 果 在 移 植 中 没 有 使 用 常 量configMAX_SYSCALL_INTERRUPT_PRIORITY
一.内核配置 1.configUSE_PREEMPTION 设置为1,使用抢先式内核:设置为0,为合作轮转内核. 2.configCPU_CLOCK_HZ 内部处理器执行的频率.这个值需要正确配置外围定时器. 3.configTICK_RATE_HZ(1-1000) RTOS时间片中断的频率. 时间片中断用来测量时间.因此更高时间片频率意味着时间测量可以有更高分辨率,同时意味着内核占用更多的CPU(效率很低). 多个任务共有同一优先级.通过切换任务,在每一个RTOS时间片内,内核将在同一优先级的
以下转载自安富莱电子: http://forum.armfly.com/forum.php 为什么要使用事件标志事件标志组是实现多任务同步的有效机制之一.也许有不理解的初学者会问采用事件标志组多麻烦,搞个全局变量不是更简单?其实不然,在裸机编程时,使用全局变量的确比较方便,但是在加上 RTOS 后就是另一种情况了. 使用全局变量相比事件标志组主要有如下三个问题: 使用事件标志组可以让 RTOS 内核有效地管理任务,而全局变量是无法做到的,任务的超时等机制需要用户自己去实现. 使用了全局变量就
热门专题
- 上一篇: freescale 16位单片机的地址映射
- 下一篇: freeradius 开启mysql模块
相关文章
-
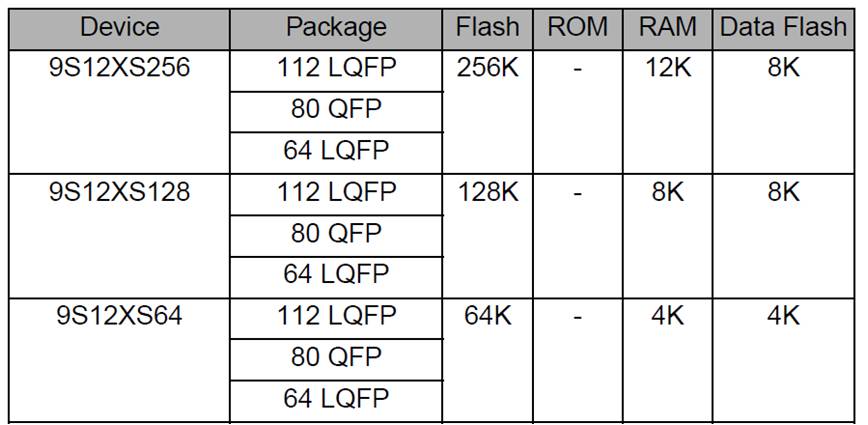
freescale 16位单片机的地址映射
freescale 16位单片机的地址映射
- 互联网
- 2026年06月03日
-
freeswitch 视频音频混用
freeswitch 视频音频混用
- 互联网
- 2026年06月03日
-
freeswitch运行状态
freeswitch运行状态
- 互联网
- 2026年06月03日
-
freeradius 开启mysql模块
freeradius 开启mysql模块
- 互联网
- 2026年06月03日
-
freemarker使用指令
freemarker使用指令
- 互联网
- 2026年06月03日
-

FreeBinary 格式说明
FreeBinary 格式说明
- 互联网
- 2026年06月03日